Kia Rio (YB): Sistema eléctrico de la carrocería / Sistema auxiliar de estacionamiento trasero
Características técnicas
| Especificación |
|
Elemento |
Especificación |
|
|
Sensor de ultrasonidos |
Voltaje nominal |
CC 12 V |
|
Gama de medición |
11,8 - 47,2 in (30 - 120 cm) |
|
|
Voltaje de funcionamiento |
DC 9 ~ 16 V |
|
|
Corriente de funcionamiento |
MÁX 350 mA |
|
|
Temperatura de operación |
-30 - 80°C (-22 - 176°F) |
|
|
Frecuencia operativa |
48 ± 5 KHz |
|
|
Número de sensores |
4 EA |
|
Componentes y localización de los componentes
| LOCALIZACIÓN DE LOS COMPONENTES |
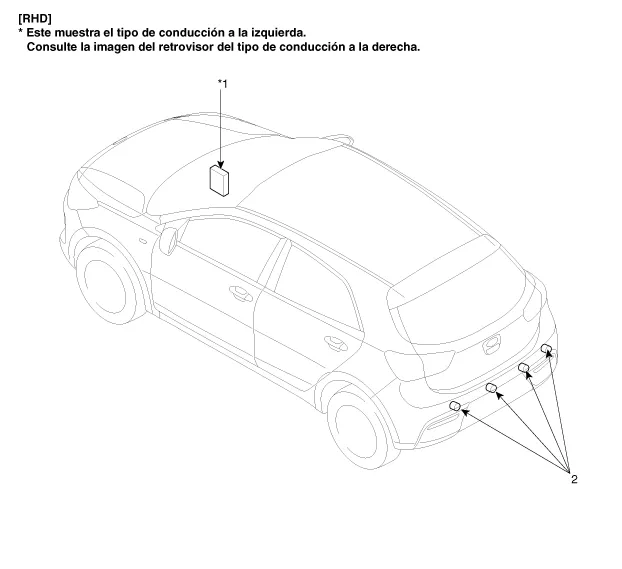
| 1. Módulo de control de la carrocería
(BCM) |
2. Sensor de ultrasonido |
La función de la unidad de control de ayuda al estacionamiento trasero está integrada en el BCM (módulo de control de la carrocería). |

Descripción y operación
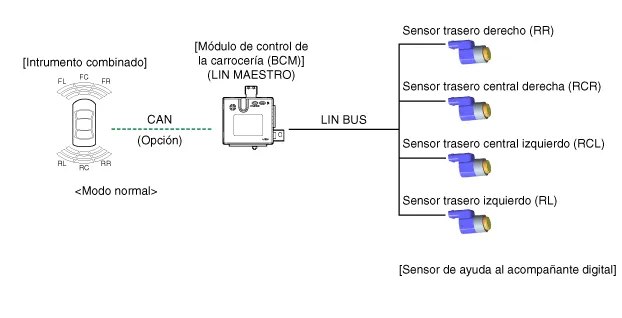
| VISTA GENERAL DEL SISTEMA |
El RPAS (sistema de ayuda al estacionamiento trasero) es un dispositivo electrónico de ayuda que avisa al conductor para que tenga cuidado al aparcar o al conductor a velocidad lenta. El sensor utiliza ondas ultrasónicas para detectar objetos cerca del vehículo.
RPAS se compone de cuatro sensores RPAS que detectan los obstáculos y transmiten el resultado por separado en tres niveles de advertencia, el primero, el segundo y el tercero al BCM a través de la comunicación LIN. El BCM decide el nivel de alarma por el mensaje de comunicación transmitido desde los sensores esclavos y después acciona el zumbador o transmite los datos a la pantalla.
Especificación de operación del sistema
| 1. |
Modo de INICIO
|
| 2. |
MODO NORMAL
|
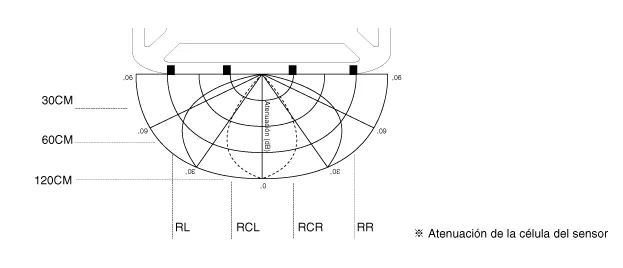
Zona de detección
| 1. |
Condición de medición – Polo PVC (diámetro 75 mm, longitud 1 m), temperatura normal |
| 2. |
Margen de distancia de objetos detectados (Directamente medida enfrente del sensor) 61 cm (60,96cm) ~ 120cm (119,89cm): ± 15 cm (5,9 in) 31 cm (12,2 pulg.) ~ 60 cm (23,6 pulg.) : ± 15 cm (5,9 in) Menos de 30 cm (11,8 pulg.) : ±10 cm (3,9 pulg.) |
Zona de detección horizontal
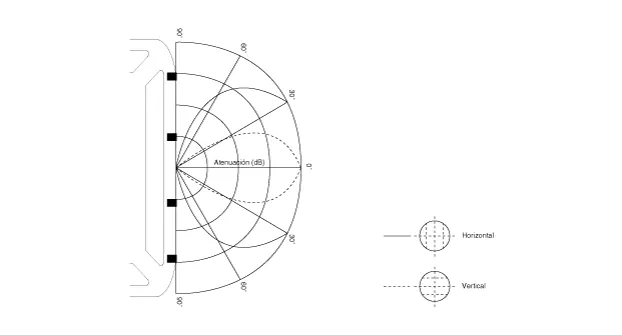
Zona de detección vertical
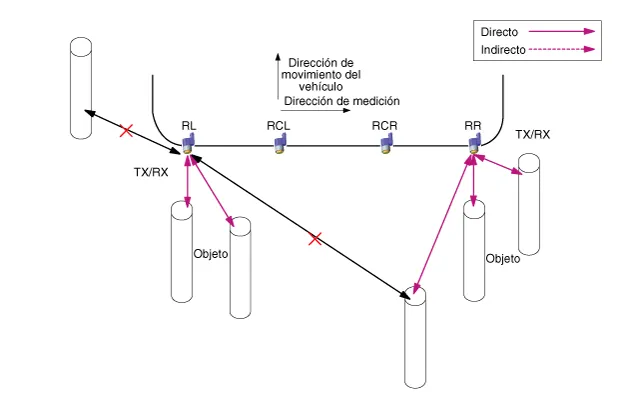
Medición de distacia
| Medición directa |
La transmisión y la recepción se realizan con un sensor
(Ejecución de cada sensor RL, RCL, RCR, RR)
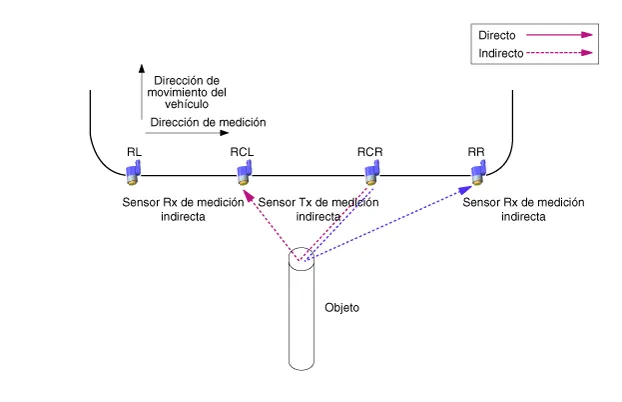
| Medición indirecta |
(Ejecución en orden: RCL → RL, RCL → RCR, RCR → RCL, RCR → RR)
Con dos o tres sensores, un de ellos envía la transmisión y los otros las reciben.
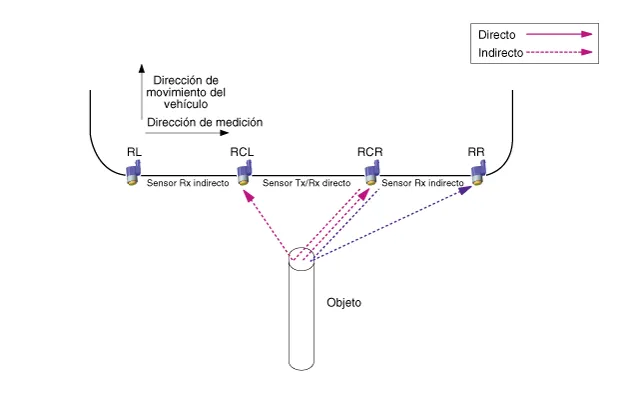
| Medición directa e indirecta de una vez |
Con dos o tres sensores, uno de los sensores realiza tanto la transmisión y la recepción y los otros realizan la recepción.
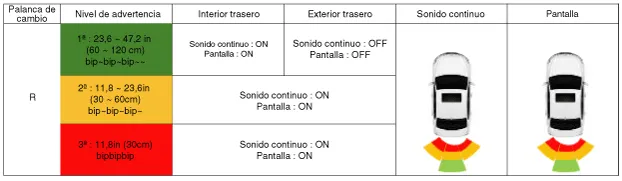
Sistema de alarma RPAS
Cuando el sensor RPAS detecta el objeto, la advertencia se activa con un dispositivo de alarma audible, como un zumbador. El sensor RPAS envía datos al BCM a través de la comunicación LIN y el BCM emite una advertencia acústica para cada SENSOR RPAS según prioridad. Desempeña un papel de entrada sólo cuando envía a un dispositivo de alarma visible, como el cuadro de instrumentos.
| – |
Método de procesamiento de información del sensor de pantalla/zumbador del BCM . En caso de información del sensor RL/RR, el BCM maneja la información de cada sensor directamente sobre la pantalla y la función de salida del zumbador. Salida del zumbador del sensor CL/CR, el BCM gestiona la información de combinación central según la prioridad de cada sensor. |
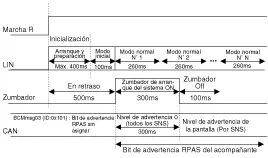
Especificación de operación del sistema
Cuando el sistema está activado (tras ENC ON y marcha atrás), MICOM verifica cada canal del sensor. Si detecta algún error, activa el zumbador durante 300ms después de 500 ms. Si se detecta algún error incluso en un sensor, activa el zumbador correspondiente al sensor defectuoso en lugar de la alarma inicial de arranque. La operación para activar el modo normal es la siguiente:
Con la marcha R seleccionada, el sistema funciona como sigue:
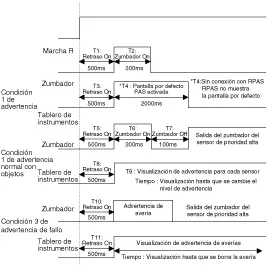
Con la marcha R liberada, el sistema funciona como sigue.
※ El margen aceptable de error en la forma de onda es ±10%.
La especificación de salida de la alarma se clasifica según la distancia entre los sensores
La lógica de condición según la prioridad del nivel de alarma es como sigue. (el sensor idéntico)
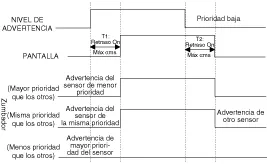
*β definición del valor
| 1. |
sensor de baja prioridad desactivado : α = 0 ms |
| 2. |
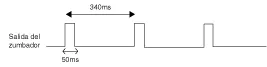
el sensor de baja prioridad está en 1° nivel de advertencia : α < 340 ms |
| 3. |
el sensor de baja prioridad está en 2° nivel de advertencia : α < 170 ms |
*β definición del valor
| 1. |
el sensor de baja prioridad está en 1° nivel de advertencia : β = 1700 ms |
| 2. |
el sensor de baja prioridad está en 2° nivel de advertencia : β = 1700 ms |
| 3. |
el sensor de baja prioridad está en 3° nivel de advertencia : β = 700 ms |
El control de la alarma según la distancia de los sensores es como sigue.
| 1. |
Área de la primera advertencia (31,9 in (81 cm) - 47,2 in (120 cm) )
|
| 2. |
Área de la segunda advertencia (16,1 in (41 cm) - 31,5 in (80 cm) )
|

| 3. |
Área de la tercera advertencia (menos de 15,7 in (40 cm))
|

Especificación del indicador de alarma visible
Al seleccionar la marcha R, el indicador en el panel de instrumentos mostrará la imagen siguiente,
Cuando el sistema detecta un objeto, el indicador se enciende inmediatamente. Si el objeto desaparece durante la operación de detección del RPAS, el indicador permanece activado durante 2 s antes de apagarse.
(Pero cuando la tercera fase de la alarma se vuelve Estado sin alarma, se enciende la tercera fase de la alarma durante dos segundos y se apaga).
| – |
Sólo muestra la posición de detección de obstáculos. |
| – |
En el tercer nivel de la alarma, el indicador parpadea con intervalos de un segundo. |
| – |
En el modo de alarma normal, pantalla integrada de RCR/RCL |
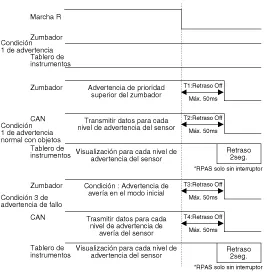
Estándar de comunicación
Esta sección define la comunicación entre el RPAS y el BCM.
El RPAS envía un resultado de detección de objeto y un resultado de diagnóstico del sensor al BCM según este documento, y el BCM tiene la función de emitir una alarma.
El indicador muestra la posición transmitida y los datos de la alarma, en el modo de alarma, detecta los DATOS más próximos y avisa primeros sobre los DATOS más próximos.
(Por ejemplo: Si RL es la alarma de primer paso y RR de tercer paso, la alarma RR tiene prioridad.)
Procedimientos de reparación Inspección 1. Con el motor del lavaparabrisas conectado al depósito de reserva, llene el depósito con agua.
Componentes y localización de los componentes Componentes Procedimientos de reparación Extracción 1. Desconecte el terminal negativo (-) de la batería.
Otra informacion:
Kia Rio (YB) Manual de Taller: Unidad de llave inteligente
Componentes y localización de los componentes Componentes INFORMACIÓN SOBRE EL PASADOR DEL CONECTOR N° CONECTOR A CONECTOR B Conector C 1 - Salida del relé de ENC 2 Battery (+)_signal 2 SSB sw
Kia Rio (YB) Manual de Taller: Aceite de compresor
Procedimientos de reparación Especificación de Aceite 1. El sistema HFC-134a requiere aceite compresor sintético (PAG) mientras que el sistema R-12 requiere aceite compresor mineral. Nunca deben mezclarse los dos tipos de aceite.
Categorías
- Inicio de Manuales
- Kia Rio Manual del Propietario
- Kia Rio Manual de Taller
- Grupo de montante delantero
- BUJÍA
- Compresor
- Novedades en el sitio
- Lo más importante del coche
